Sumario
-
Sistema Vial.
-
Siniestralidad Vial.
-
Evolución subsistema tecnológico.
-
Vehículo autónomo y conectado, antecedentes y evolución.
-
4.1 Tendencias disruptivas y niveles de conducción.
-
4.2 Validación del vehículo autónomo y conectado.
-
Conclusiones.
-
Bibliografía.
I. SISTEMA VIAL
Fruto de la tendencia natural del hombre a la movilidad, desde que las sociedades se convirtieron en nómadas, diversos han sido los medios de transporte de los que se ha servido el hombre para poder desplazarse de un lugar a otro, a mayores distancias y en el menor tiempo posible. Sin embargo, ligada a la evolución de la automovilística, desde que en el siglo XIX se patentase el primer vehículo a motor hasta mediados del siglo XX donde su fabricación y uso tornó en generalista se puede hablar de sistema vial (vehículos, normas, vías y personas interaccionan en un complejo entramado que lo identifica como único y diferenciable de cualquier otro sistema).
De esta forma, y con el fin de entender conceptualmente el sistema vial, recurrimos a la Teoría General de Sistemas, en adelante TGS, la cual se remonta a los orígenes de la ciencia y la filosofía al encontrar su antecedente remoto en la célebre frase del filósofo presocrático Anaxágoras “Todo tiene que ver con todo”, ya que nada puede existir aislado. O bien, lo que expresaba Aristóteles en “El todo es más que la suma de las partes”; ambos pensamientos nos aproximan a la idea de que las partes no se pueden comprender si se consideran aisladas del todo, al estar interrelacionadas o interdependientes, de tal forma que cada elemento interconectado forma un sistema que funciona como un todo y así nos permite comprender mejor su funcionamiento.
Si bien, no es hasta mediados del siglo XX cuando dicha teoría se generaliza, dado que el biólogo Ludwig von Bertalanffy (1901-1972), quien para comprender el funcionamiento de un cuerpo creyó necesario entender la actividad de sus partes y su rol en el desempeño global. Teniendo en cuenta su investigación, se sucedieron estudios multidisciplinares que gracias a la fortaleza descriptiva de la TGS la hicieron útil para poder explicar fenómenos complejos, que en el caso que nos ocupa será el sistema vial. Así, se presenta como una forma sistemática y científica de aproximación y representación de la realidad caracterizándose “por su perspectiva holística e integradora, en donde lo importante son las relaciones y los conjuntos que a partir de ellas emergen” (Arnold Cathalifaud, 1998, pág. 41), es decir, lo sustancial es entender las interrelaciones de los distintos elementos que componen el sistema.
Se infiere por tanto, que un determinado sistema es un conjunto de elementos que se encuentran unidos a través de interacciones o interrelaciones que lo pueden mantener estable, homeostasis, que opera a través de “compensaciones internas al sistema que sustituyen, bloquean o complementan estos cambios con el objeto de mantener invariante la estructura sistémica, es decir, hacia la conservación de su forma” (Cathalifaud y González, 1998, pág. 48), en contra de la entropía, que es la tendencia de los sistemas a desgastarse, a desintegrarse, a desorganizarlo para terminar en un desorden total.
Es por esto, que la TGS nos ofrece la posibilidad de entender la relación existente entre los elementos que conforman el Sistema Vial1, Ilustración I, esto es, el subsistema humano, subsistema tecnológico, subsistema de infraestructuras y subsistema normativo2; también las vulnerabilidades del mismo en su conjunto, de cada uno de los subsistemas en particular, y con el objetivo de intervenir sobre aquella causa/s que bien de modo aislado o en interdependencia con los distintos elementos integrantes, originan los siniestros viales.
 Ilustración 1.
Sistema Vial formado por cuatro subsistemas unidos por enlaces dónde además de los atributos que forman parte de cada uno de los mismos resulta imprescindible entender las relaciones existentes entre ellos al objeto de hallar causa a los siniestros viales.
Ilustración 1.
Sistema Vial formado por cuatro subsistemas unidos por enlaces dónde además de los atributos que forman parte de cada uno de los mismos resulta imprescindible entender las relaciones existentes entre ellos al objeto de hallar causa a los siniestros viales.
Fuente Modelo Secuencial de Eventos de un Siniestro (MOSES).Elaboración propia.
Acorde con lo referido, y con el propósito de esclarecer la etiología de los siniestros viales, existe la necesidad de realizar su estudio a través de un modelo, de una investigación secuencial, y de este tipo porque “describe el siniestro como el resultado final de una secuencia de hechos producidos en un orden especifico, es decir, como el final lógicamente necesario de una sucesión de eventos vinculados entre sí por una relación de causa a efecto” (Tabasso, 2012, pág. 18). Eventos que según Campón Domínguez, son “el resultado de la acción de un elemento o subsistema dentro del sistema vial que, en determinadas condiciones, produce un cambio de estado total o parcial de dicho sistema” (Domínguez, pág. 36), por tanto, de lograr explicar de acuerdo a este mismo autor de “forma simple y sencilla las complejas interrelaciones de los elementos del sistema del tráfico que conducen a un siniestro vial”. En otros términos, pretende expresar la interrelación existente entre todos los subsistemas que conforman el sistema vial, a través de un modelo secuencial y que parte de la premisa de que los siniestros no se producen de forma instantánea, sino que se desarrollan en el tiempo y en el espacio, dicho modelo se conoce como Modelo Secuencia de Eventos del Siniestro (MOSES).
Sigue (Domínguez, pág. 40) en relación a MOSES, mencionando que para analizar la evolución del siniestro vial se aplica, desde un punto de vista psicológico, la teoría PIEV (Percepción3, Intelección4, Emoción5 y Valoración6) sobre las personas que intervienen en la secuencia de eventos de acuerdo a determinadas posiciones relevantes.
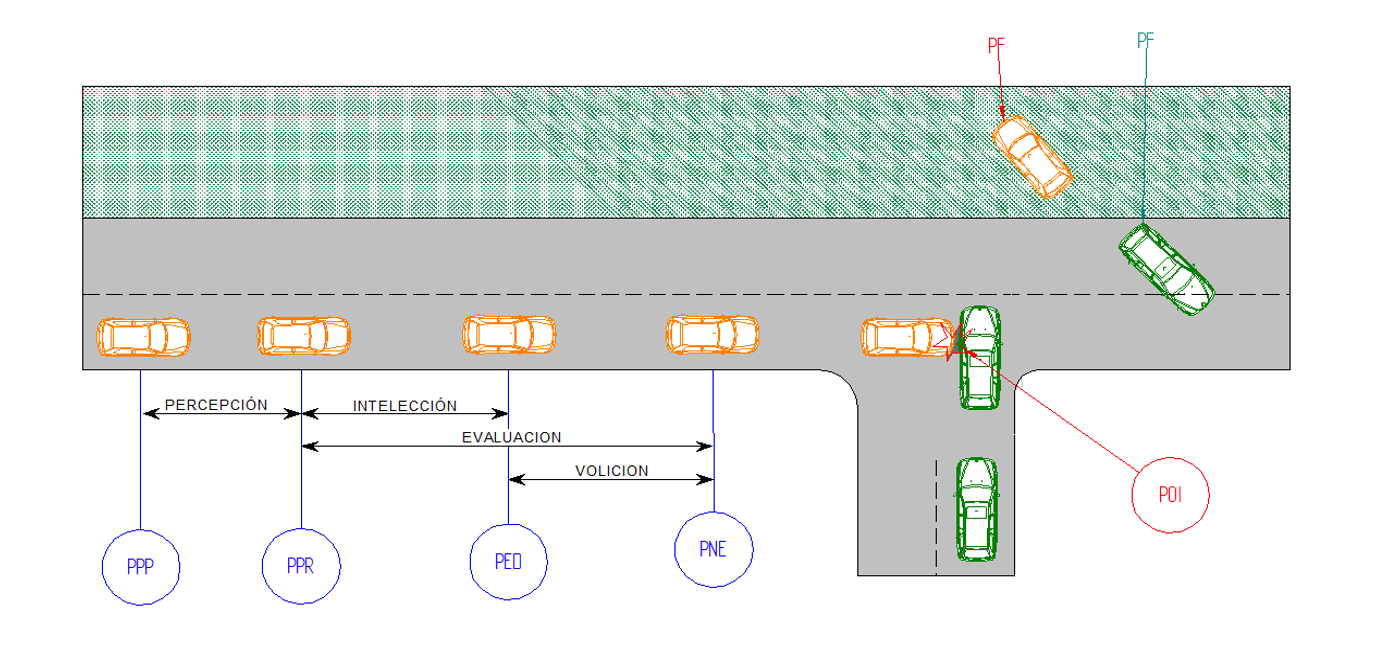 Ilustración 2.
Posiciones relevantes en MOSES, para explicar el desarrollo del siniestro vial se utiliza la teoría PIEV en relación con las distintas posiciones relevantes, de tal forma que la percepción se sitúa entre el PPP y el PPR dónde se deben investigar cuestiones de carácter somático y psíquico así como las condiciones ambientales y de la propia vía; seguidamente en la fase de intelección, entre PPR y PED, habrá que seguir investigando cuestiones relacionadas con aspectos psíquicos y somáticos, al igual que en la evaluación, entre PPR y PNE, si bien, habrá que conocer sobre el conocimiento y la experiencia que se posee. Por último, en la volición, entre PED y PNE, adicionalmente se tendrá que comprobar estado pavimento, sistemas de seguridad activa como los frenos del vehículo.
Ilustración 2.
Posiciones relevantes en MOSES, para explicar el desarrollo del siniestro vial se utiliza la teoría PIEV en relación con las distintas posiciones relevantes, de tal forma que la percepción se sitúa entre el PPP y el PPR dónde se deben investigar cuestiones de carácter somático y psíquico así como las condiciones ambientales y de la propia vía; seguidamente en la fase de intelección, entre PPR y PED, habrá que seguir investigando cuestiones relacionadas con aspectos psíquicos y somáticos, al igual que en la evaluación, entre PPR y PNE, si bien, habrá que conocer sobre el conocimiento y la experiencia que se posee. Por último, en la volición, entre PED y PNE, adicionalmente se tendrá que comprobar estado pavimento, sistemas de seguridad activa como los frenos del vehículo.
Fuente Modelo Secuencial de Eventos de un Siniestro (MOSES). Elaboración propia.
Por consiguiente, partiendo de los rasgos que identifican a cada subsistema, una vez producido un siniestro vial, se deberá indagar en cada uno de sus atributos al objeto de comprender y determinar con mayor profusión cuál o cuáles han sido los factores determinantes en el desenlace del mismo. En este sentido, de modo muy simplificado, sobre el subsistema el humano realizar averiguaciones acerca de las condiciones psicofísicas de los implicados, si estos han ingerido alcohol o consumido sustancias estupefacientes; del vehículo comprobar el estado de los neumáticos, alumbrado, partes mecánicas y lectura tacógrafo si fuese obligatorio; de la vía reflejar su configuración y el estado en el que se encontraba momento siniestro; y sobre el subsistema socio normativo relacionar las normas con respecto al conductor, al vehículo y a la vía.
En síntesis, los modelos son necesarios para la investigación7 del siniestro vial, también la de ser lo suficientemente representativos de la realidad para describir las interrelaciones entre los distintos subsistemas, aún lograr identificar los distintos elementos que conforma a cada uno de ellos y finalmente lograr establecer el mayor número de conexiones para poder explicitar el siniestro vial. De tal forma que, el objetivo no es poner el foco de atención sobre la causa misma del accidente sino de aquellas otras que hayan podido influir sobre ella, de entender cómo se comporta tal sistema, hallar sus desequilibrios, para subsiguientemente adoptar actuaciones sistémicas y transversales de la totalidad de los elementos del sistema para dotarlo de mayor estabilidad.
II. SINIESTRALIDAD VIAL
(Tabasso, 2012, pág. 21), citando a Erik Hollnagel entendía que “Sólo se puede prevenir el accidente si es descrito y comprendido de forma correcta”. Y en efecto, esta es la razón por la cual se debe abordar el estudio de un determinado siniestro vial, sobre la totalidad del sistema descrito en apartado anterior, las condiciones y su desarrollo, sólo de este modo podremos comprender la causa o causas que lo han originado. Un estudio pormenorizado de los factores asociados a cada subsistema disgregado por fases8 (pre-viaje, viaje, pre-impacto, impacto y post-impacto), desde que el conductor se encuentra en su domicilio planificando o decidiendo hacia donde se dirige, hasta la posición final de los vehículos y personas tras la producción del siniestro.
Definir por tanto la causalidad de la siniestralidad vial, requiere establecer relaciones entre los distintos subsistemas, preponderantemente sobre el humano ya que de acuerdo al informe de las principales cifras de la Siniestralidad Vial que publica anualmente la Dirección General de Tráfico, en adelante DGT; los factores concurrentes en accidentes con víctimas y accidentes mortales ocurridos en vías interurbanas, cuasi en su totalidad son debidos a causas antrópicas (distracciones, velocidad inadecuada, no respectar normas de prioridad, consumo alcohol), que porcentualmente se encuentran por encima del 90 % del total de la siniestralidad de cada periodo anual.
Mientras tanto, las cifras mortales en siniestros viales que nos aporta la DGT, su curva evolutiva, no sólo ha dejado de descender, sino que se ha mantenido estable y desde el año 2016 aumentar para alcanzar en el año 2018 las 1180 y descender en el año 2019 a las 1098 personas fallecidas. Esta circunstancia nos conduce a la idea de que existe una resistencia a seguir mejorando, más aún cuando el sistema vial depende en exceso del subsistema humano.
Siendo en esencia el subsistema humano el elemento cuya magnitud influye sobre los demás subsistemas, por las uniones que establece con cada uno de ellos y sobre la totalidad del sistema vial, para seguir una tendencia bajista cabrían dos posibilidades, actuar sobre el subsistema humano de modo distinto al habitual, o restarle protagonismo para permanecer en un segundo plano.
Con respecto a la primera de las premisas, lo sustancial hasta el momento presente, ha sido la de introducir cambios legislativos, carné por puntos en el año 2006, las sucesivas reformas del código penal en materia de seguridad vial, que junto con las actuaciones de vigilancia y control, han sido reconocidas como el gran puntal9 del Plan Estratégico10 de Seguridad Vial 2005-2008, cuyo objetivo fue la de reducir en un 40% de la cifra de fallecidos en el periodo de su vigencia, tomando como referencia el año 2003. En línea con el anterior Plan, la actual Estrategia de Seguridad Vial 2011-2020, pretende reducir, en su ciclo de validez, a la mitad el número total de víctimas mortales en las carreteras de la Unión europea para 2020. Con este fin, se han ido tomando medidas, siendo las últimas la actual reducción del límite de velocidad a 90 km/h en las carreteras convencionales, cuyo grado de eficacia dependerá en gran medida del grado de control sobre dicha variable.
Y menciono el grado de eficacia de la introducción de esta nueva medida normativa, porque como se ha mencionado, los factores concurrentes en la mayor parte de siniestralidad vial (alcohol, velocidad, distracción), son debidos a la transgresión de la norma por parte de un ser humano individual, que toma decisiones libremente, pero que no percibe subjetivamente riesgo alguno, a pesar de lo objetivo que es circular a una velocidad adecuada, no abrocharse el cinturón, no mantener atención permanente mientras conducimos, etc, riesgos todos ellos objetivables y objetivos, pero que con una inadecuada percepción de riesgo subjetivo.
No es bastante conocer la norma, sino que resulta indispensable comprenderla y aceptarla para poder cumplirla, ambas premisas junto con el nivel de riesgo subjetivo asociado a su incumplimiento actúan como componentes que generan resistencia en los conductores y usuarios viales originando desequilibrios en el sistema vial. Justamente, unida a la segunda de la premisas, por la cual abogo y en la que creo que la siniestralidad vial tiene margen de mejora, es precisamente la de ceder paulatinamente protagonismo al subsistema tecnológico como se desarrollará en el siguiente apartado.
III. EVOLUCIÓN SUBSISTEMA TECNOLÓGICO
El vehículo se ha convertido en un instrumento al servicio del ser humano para desenvolverse en la vida cotidiana, también como utensilio de trabajo, e incluso como instrumento de ocio. Precisamente, la producción de automóviles tras la II Guerra Mundial no ha parado de crecer durante todo el siglo XX hasta nuestros días. Se pasó de los 5.4 millones en el año 1929 a los 28.6 en el año 1980 (Ruiz, 2001, pág. 135), y según Organización Internacional de Fabricantes de Vehículos Motorizados (OICA11), la producción en el año 2018 ha sido de 91.538.640 millones de vehículos; asimismo, según las estadísticas de esta misma Organización, los vehículos en uso en el año 2015 alcanzó la cifra de 1.282.270 millones, esto supone que disponemos de un vehículo cada seis personas, al haber superado los siete millones y medio de habitantes en el mundo según el Banco Mundial en el año 2017.
Esta circunstancia, ha generado que los cuatro subsistemas del sistema vial se encuentren en continua interacción, dado que diariamente se producen millones de desplazamientos de personas y mercancías a lo largo de todo el planeta. Como resultado de ello, el sistema está sujeto a cambios, a la probabilidad de que se produzca un desequilibrio homeostático, a la pérdida de estabilidad. Tal es así, que cerca de 1,3 millones de habitantes del mundo perecen anualmente consecuencia de siniestros viales y hasta 20 millones sufren traumatismos graves según la Organización Mundial de la Salud (OMS).
Sin lugar a dudas, una cifra lo suficientemente preocupante para situarla entre las epidemias ocultas de la humanidad de acuerdo a la OMS, y que según el informe sobre el estado global sobre seguridad vial 2018 de este organismo, requiere de la implementación de acciones contundentes para salvar vidas. En otras palabras, a pesar de la importancia del vehículo en nuestra forma de vivir, del progreso que supuso su fabricación en serie y subsiguiente comercialización, ha sido y es un medio fatal para muchas personas en el desenlace final de los siniestros viales. Claro que esta circunstancia, no supone que el vehículo en sí mismo sea el elemento distorsionador del sistema vial, sino que como se ha visto, es el factor humano el que altera el equilibrio del sistema. Todas estas observaciones, nos guían hacia la idea de si el vehículo ha sido motor de progreso, pueda ser también una solución a tamaño problema.
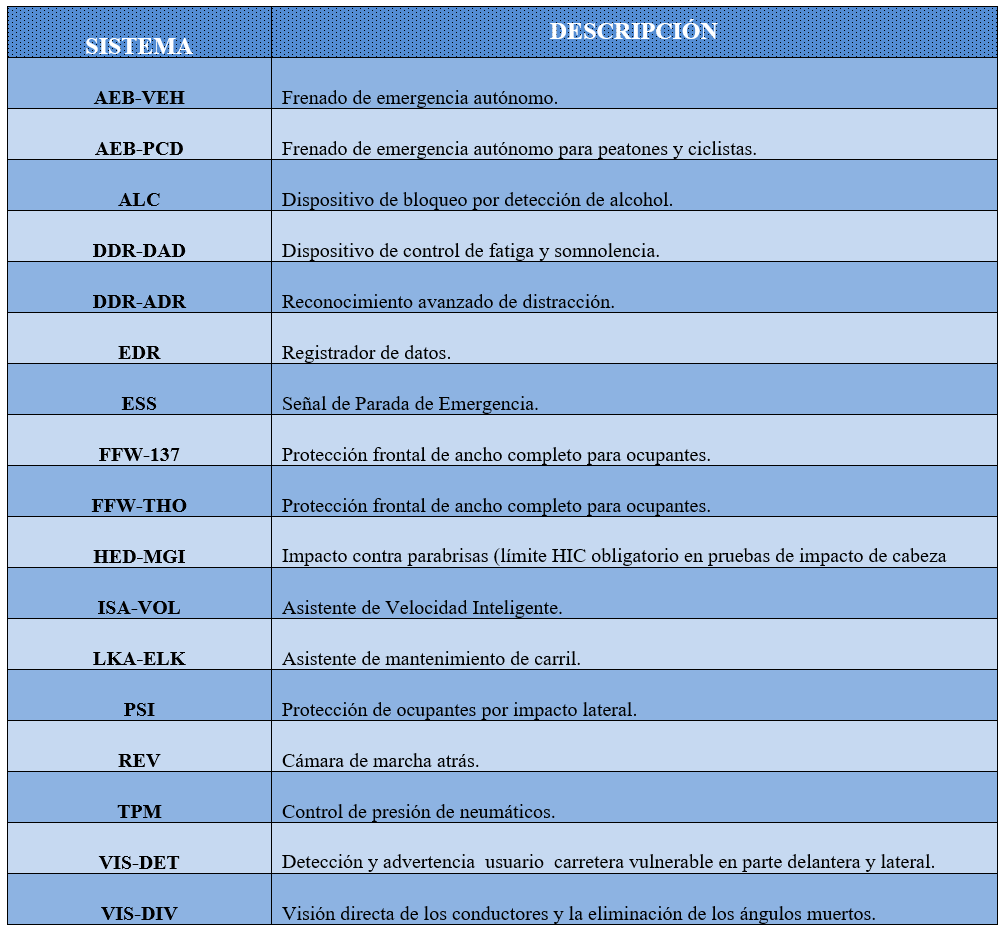
Luego, a lo largo del desarrollo de la industria automotriz, se han ido incorporando sistemas de seguridad activa (los destinados a evitar el siniestro vial), y seguridad pasiva (los destinados a reducir las consecuencias una vez producido el siniestro vial). En Ilustración 3, se señalan las etapas en las cuales ha sido introducido cada uno de los sistemas; hacia el futuro se destaca la obligatoriedad de incorporar 12 nuevos sistemas de seguridad12 que deberán equipar todos los coches nuevos que sean comercializados a partir del año 2022 en el territorio europeo. Con este fin, se trata de que todos los vehículos que circulen por las vías del mencionado espacio, se encuentren equipados cuanto antes con los últimos avances en materia de seguridad activa y pasiva, Ilustración 4.
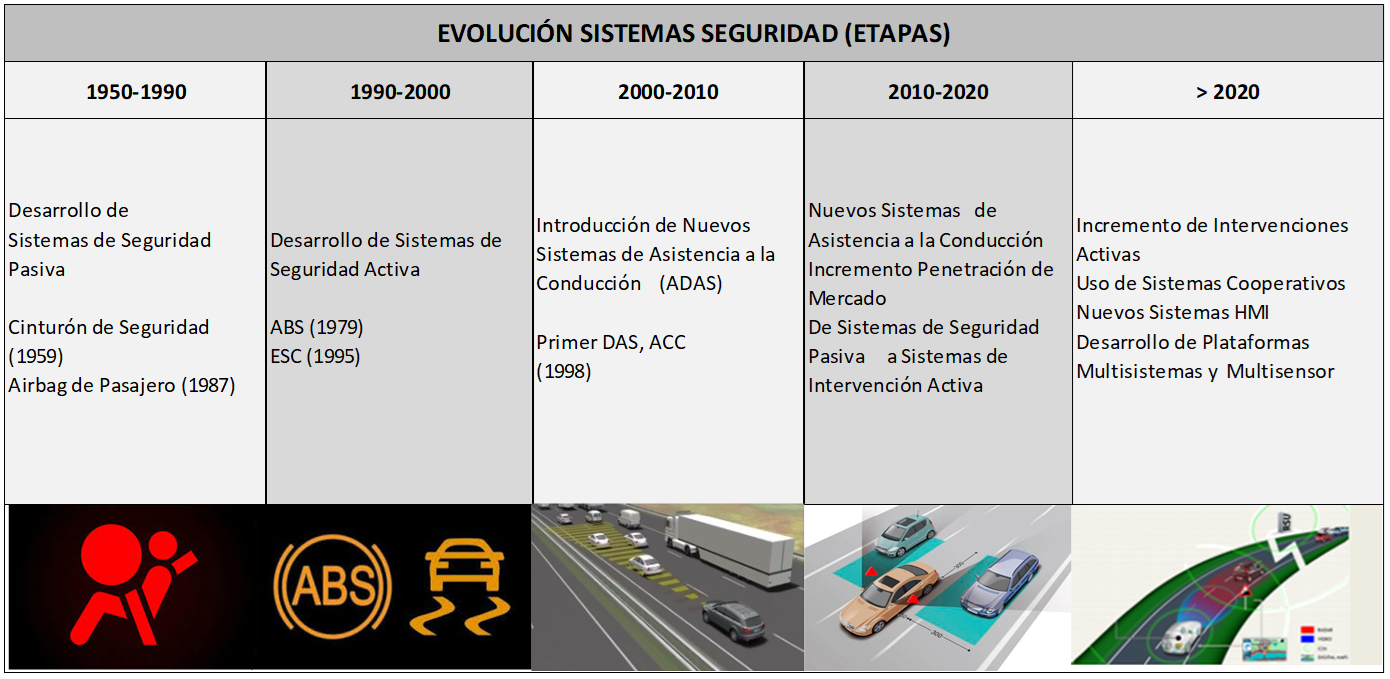 Ilustración 3.
Evolución sistemas de seguridad de los vehículos.
Ilustración 3.
Evolución sistemas de seguridad de los vehículos.
Elaboración propia.
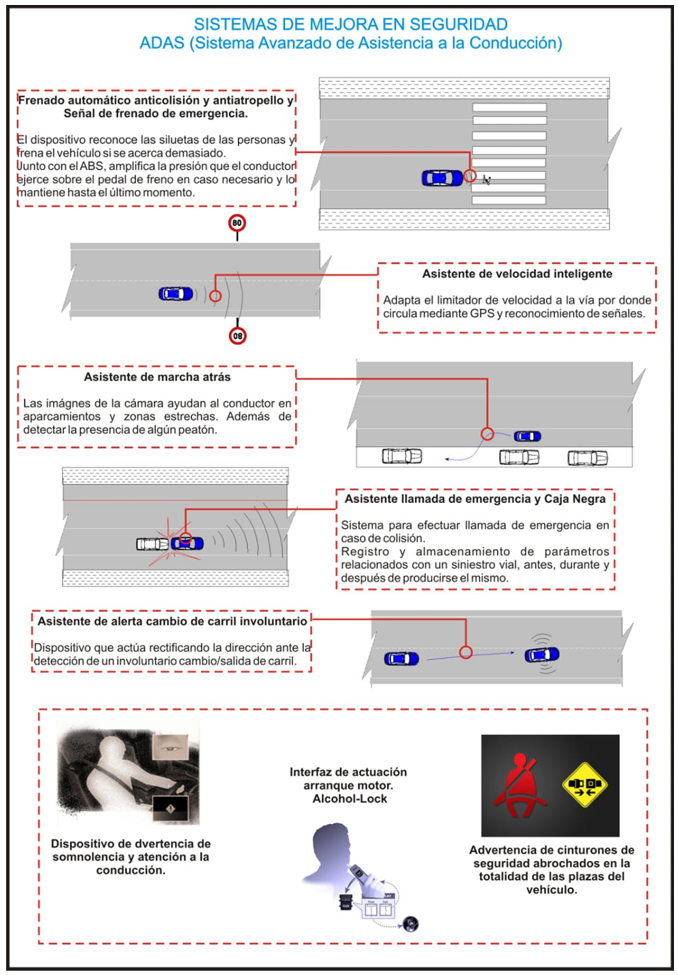 Ilustración 4.
desarrollo esquemático sistemas ADAS.
Ilustración 4.
desarrollo esquemático sistemas ADAS.
Elaboración propia.
En este mismo orden de cosas, la obligatoriedad de incorporar nuevos sistemas de seguridad, auspiciada por la Comisión Europea13, forma parte de una serie medidas que el Estado español, entre otras14, que debe incorporar en su estrategia de seguridad vial 2021-2030 para disminuir la siniestralidad vial grave, y progresivamente lograr alcanzar la cifra de 0 fallecidos en carretera en el año 2050 como parte de la visión que la DGT mantiene en su página web y la propia UE.
Por esta razón, se entiende que incorporar dicha tecnología en los vehículos de serie, la de mejorar infraestructuras y la movilidad conectada y automatizada, de la que se hablará en próximos capítulos, tratarán de contribuir a alcanzar los objetivos que la Unión Europea en su conjunto y los Estados en particular persiguen.
Retornando a los avances que la automovilista ha logrado en pro de la seguridad vial, mediante el “Informe y Análisis Sobre la Influencia de los Sistemas de Ayuda a la Conducción en la Seguridad Vial” publicado por (DGT, 2016) en el mes de Octubre del año 2016, se llega a la conclusión que los sistemas ADAS, Ilustración 4, tendrían un efecto directo en más del 57% de total de siniestros viales registrados en España, y lo que es más importante, o se evitarían o amortiguaría las consecuencias, (DGT, 2016).
El anexo técnico al informe de la Comisión Europea (Europea, 2018) GSR2 resulta muy ilustrativo en el sentido de realizar una estimación de la reducción de siniestros viales con víctimas en función de la categoría del vehículo, y del conjunto de seguridad implementado PO1, PO2 y PO315. Del mismo, se extrae la conclusión de que el costo-efectividad es favorable en todas las categorías de vehículos, si bien, los impactos PO2 y PO3 superan por amplio margen los del PO1, tal circunstancia sería una razón de peso para favorecer la implementación de paquetes de seguridad PO2 o PO3.
Lista de medidas de seguridad.
Fuente: Comisión Europea. Cost-effectiveness analysis of Policy Options for the mandatory implementation of different sets of vehicle safety measures – Review of the General Safety and Pedestrian Safety Regulations. Elaboración propia.
Opciones para turismos distribuidas por paquetes seguridad.
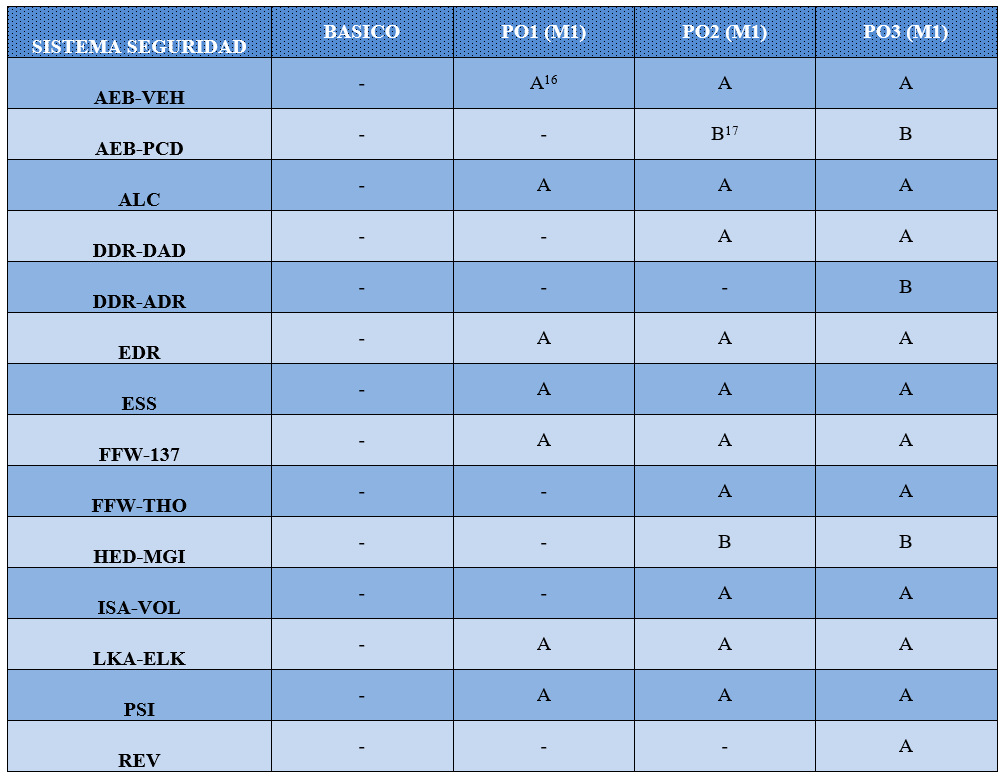
Fuente: Comisión Europea. Cost-effectiveness analysis of Policy Options for the mandatory implementation of different sets of vehicle safety measures – Review of the General Safety and Pedestrian Safety Regulations. Elaboración propia.
De esta suerte, lo que aquí prima es la seguridad que nos ofrece los sistemas de ayuda a la conducción, de encomendar el control a los mismos cuando el ser humano se distrae debido a la falta de atención, por la merma de condiciones psicofísicas o la de mitigar determinados riesgos que se han asumido voluntariamente, e incluso impedir que se asuman.
IV. Vehículo autónomo y conectado, antecedentes y evolución
Desde los años 20, se ha producido una evolución en la tecnología de los vehículos automatizados, años en los que se presentó oficialmente el primer vehículo controlado por radio18. En las siguientes décadas, los nuevos sistemas del vehículo se han desarrollado a la par que los avances electrónicos que han hecho posible su desarrollo real.
En 1958 Chrysler incorporó el primer sistema de inyección electrónico denominado “Electrojector” controlado por transistores. En 1969, John McCarthy describe algo similar al moderno vehículo autónomo en un ensayo titulado “Coches controlados por computadora”. McCarthy se refiere a un “chofer automático”, capaz de navegar por una vía pública a través de una “entrada de cámara de televisión que utiliza la misma entrada visual disponible para el conductor humano. En 1995, Pomerleau llevan su sistema basado en redes neuronales “Navlab” en la carretera. Su monovolumen autónomo (tienen que controlar la velocidad y el frenado) viaja 2,797 millas de costa a costa desde Pittsburgh, Pennsylvania a San Diego (California), en un viaje que el par llama "No Hands Across America". El vehículo disponía de un sistema operativo de 100 millones de operaciones de punto flotante por segundo, o aproximadamente una décima parte de la potencia de procesamiento del Apple Watch. La CPU del vehículo era del tamaño de un refrigerador y estaba alimentada por un generador de 5,000 vatios.
En la década de los 2000 comienzan a surgir sistemas de ayuda al estacionamiento, lo que demuestra que los sensores y las tecnologías de los vehículos se están preparando para los escenarios del mundo real. El vehículo híbrido Prius japonés de Toyota ofrece asistencia automática de estacionamiento paralelo desde 2003, mientras que Lexus pronto agrega un sistema similar para su sedán Lexus LS, Ford incorpora Active Park Assist en 2009, y BMW lo sigue un año después con su propio asistente de estacionamiento paralelo.
Como se infiere, ha sido la evolución tecnología y más concretamente la electrónica, la que ha determinado a la evolución del vehículo, pero igualmente de importante para su impulso ha sido la necesidad de incorporar sistemas de seguridad en los vehículos, reflejado en la evolución de dichos sistemas.
La preparación actual y futura de los vehículos autónomos y conectados se basa en cuatro pilares fundamentales, normativa y legislación, infraestructura, tecnología e innovación, y aceptación por parte del consumidor. En el presente apartado nos centraremos en el nivel tecnológico alcanzado en el desarrollo del vehículo autónomo y conectado, objetivo del presente documento, con referencias a los otros pilares dado que no son líneas separadas al estar fuertemente interrelacionadas.
Como se ha comentado, la obligatoriedad de incorporar sistemas seguridad, condiciona el plan de los constructores en la elección e implementación de funciones que se están incorporando progresivamente en el vehículo autónomo y conectado. Sin embargo, estas funciones serán incorporadas siempre y cuando sea el desarrollo tecnológicamente viable. Uno de los objetivos de los nuevos sistemas de seguridad es disminuir los accidentes debido a que el factor humano es causa de los mismos. A medida que se automatiza más el vehículo, de acuerdo a los diferentes niveles de automatización, el conductor disminuye su actuación en la conducción, siendo sus funciones sensoriales sustituidas por tecnología como se muestra en la siguiente Ilustración:
Toma de decisiones: la toma de decisiones en la conducción son sustituidos por Algoritmos. Toman especial relevancia los Algoritmos artificiales de redes neuronales, unsupervised/deep learning, machine learning implementados en plataformas hardware multiprocesador (GPUs). Estos algoritmos aprenden en tiempo real el comportamiento “estándar” de la conducción, con capacidades de predicción, envío de notificaciones, identificación temprana de anomalías y detección de patrones.
Memoria: una conducción autónoma requiere conocer la ubicación exacta, la velocidad y la dirección del automóvil, así como la situación actual del tráfico y el comportamiento de otros participantes del tráfico. Las referencias básicas para disponer de esta información multidimensional son mapas HD con una precisión de ± 10 cm, que combinados con GPS diferenciales (y otros posibles sensores) permiten situar al vehículo dentro de la vía con una exactitud menor de 10 centímetros. Esta información es mejorada por las actualizaciones en el estado en tiempo real.
Ojos: el vehículo es equipado con diferentes tipos de sensores para hacer una monitorización 360º del entorno. Cámaras, radares o ultrasonidos, son ejemplos de este tipo de sensores, que ofrecen gran cantidad de datos. La calidad de estos datos y su tratamiento (fusión de datos) condicionará el grado de confiabilidad, y eficiencia de los distintos subsistemas desarrollados.
Oído: con la comunicación C2X19, “cloud computing”20 o FCD21 se consigue la “detección” de eventos potencialmente peligrosos para la conducción donde no existen sensores convencionales para ello. Está comunicación nos permite, por tanto, disponer de información para predecir situaciones de peligro y que el sistema pueda actuar en consecuencia.
Reflejos/Coordinación de movimientos: el vehículo toma el control de la dirección, aceleración y frenos. La incorporación de sistemas como Steer by wire y nuevos algoritmos de control predictivo (MPC), permiten decidir automáticamente las maniobras teniendo en cuenta los objetos y actuando de acuerdo a los estrictos parámetros de seguridad.
Así, un vehículo autónomo, también conocido como robótico, o informalmente como sin conductor o auto-conducido, es un automóvil capaz de imitar las capacidades humanas de manejo y control. Como vehículo autónomo es capaz de percibir el medio que le rodea y navegar en consecuencia. De acuerdo a esta definición, en el presente documento nos referiremos a “vehículo automatizado” en aquellos casos en los que existe intervención por parte del conductor en la conducción del vehículo, y de “vehículo autónomo” sólo en aquellos casos en los que la intervención del conductor es inexistente.
4.1 Tendencias disruptivas y niveles de conducción
Como se ha comentado previamente, en los últimos años ha habido un gran avance tecnológico. Este hecho unido a las nuevas políticas de sostenibilidad, preferencias del consumidor y la aparición de nuevos mercados, están produciendo grandes cambios en la industria automovilística. Actualmente en el mundo de la automoción, son cuatro las tendencias-tecnológicas disruptivas que están dando lugar a este cambio.
Movilidad: los consumidores de hoy en día usan sus automóviles como vehículos "multiuso", sin importar si viajan solos al trabajo o llevan a toda la familia a la playa. En el futuro, es posible que quieran la flexibilidad para elegir la mejor solución para un propósito específico, bajo demanda y a través de sus teléfonos inteligentes. Ya podemos observar señales tempranas de que la importancia de la propiedad de automóviles privados está disminuyendo, y que la movilidad compartida está aumentando.
Electrificación: los vehículos eléctricos están generando mucho interés y se ve un fuerte potencial. Las regulaciones de emisiones más estrictas, los menores costos de la batería, las estaciones de carga ampliamente disponibles y la creciente aceptación del consumidor crearán un nuevo y fuerte impulso para la penetración en el mercado de vehículos electrificados.
Conducción Autónoma y Conectividad: el tercer y cuarto eje de las tendencias tecnológicas, son la conducción autónoma y conectividad, núcleo del presente documento. La disponibilidad comercial de los AVs22 depende de los diferentes constructores, pero se estima que estén disponibles principalmente a partir del 2020. Estos vehículos podrán ser totalmente autónomos en escenarios controlados como puede ser un parking, carriles especiales de ciudad, etc…
Sin embargo, en escenarios más complejos, no será posible para esa fecha garantizar el correcto funcionamiento de los diferentes “casos de uso”23 que debe cubrir un vehículo totalmente autónomo, y el conductor deberá intervenir en la conducción restringiendo el uso de funciones implementadas en el vehículo.
De acuerdo al nivel de automatización del vehículo se han definido 5 niveles, recogidos en la norma SAE J3016. La implicación en la conducción por parte del conductor y de los diferentes sistemas del vehículo en estos niveles es el siguiente:
Nivel 0: Únicamente Conductor. Conductor: El conductor realiza continuamente la tarea de conducción dinámica lateral y longitudinal. Sistema: Ningún sistema activo de vehículo interviene.
Nivel 1: Asistencia al Conductor. Conductor: El conductor realiza continuamente la tarea de conducción dinámica lateral o longitudinal. Sistema: La otra tarea de conducción la realiza el sistema.
Nivel 2: Automatización Parcial. Conductor: El conductor debe supervisar la tarea de conducción dinámica y el entorno de conducción en todo momento. Sistema: El sistema realiza tareas de conducción longitudinal y lateral en un caso de uso definido.
Nivel 3: Automatización Condicional. Conductor: El conductor no necesita supervisar la tarea de conducción dinámica ni el entorno de conducción en todo momento; siempre debe estar en una posición para reanudar el control. Sistema: El sistema realiza tareas de conducción longitudinal y lateral en un caso de uso definido. Reconoce sus límites de rendimiento y pide al conductor reanudar la tarea de conducción dinámica con margen de tiempo suficiente.
Nivel 4: Automatización Alta. Conductor: El conductor no es requerido durante el caso de uso definido. Sistema: El sistema realiza la tarea de conducción dinámica lateral y longitudinal en todas las situaciones de un caso de uso definido.
Nivel 5: Autónomo. Conductor: No se requiere conductor. El sistema realiza la tarea de conducción dinámica lateral y longitudinal en todas las situaciones encontradas durante todo el viaje.
4.2 Validación del vehículo autónomo y conectado
Como ya se ha comentado en apartados anteriores, los vehículos autónomos tienen un gran potencial para la reducción de los accidentes existentes hoy en día, que en un 90% son debidos a errores humanos. El apartar al factor humano del “loop”, garantiza que los fallos debidos a distracciones, a cansancio, a problemas de alcoholemia y consumo de drogas asociadas a la conducción no deberían contribuir a la producción de fatalidades relacionadas con la movilidad. Aun así, hay que tomar en consideración que el vehículo autónomo no va a reducir completamente la tasa de siniestralidad vial, sino que se producirán escenarios en los que los sistemas puedan funcionar con menor rendimiento que un conductor humano (por ejemplo, condiciones climáticas adversas), e incluso cómo se comportará, cuando nuevas variables sean factor concurrente o determinante en la producción de accidentes, (a modo de ejemplo, posibles ataques de ciberseguridad). Así, se plantean dos cuestiones básicas:
¿Cuál es el criterio que nos permite garantizar que un vehículo autónomo es confiable y seguro?
¿Cómo garantizar que se alcanza el criterio definido?
Definir el nivel de seguridad que tiene que alcanzar un vehículo para poder autorizar su circulación en carretera no es una pregunta nueva, puesto que ya existe para los vehículos controlados manualmente, porque que previamente a su salida a carretera se debe garantizar su nivel de seguridad.
El criterio que permita garantizar la salida a carretera de un vehículo autónomo garantizando su confiabilidad y seguridad depende de varios factores, aunque principalmente se puede considerar la tasa de fallos técnicos del sistema como el principal elemento con influencia en el nivel de seguridad del vehículo. En este caso, por ejemplo, se habla de tasas de fallo HW menores de 10-8/h para alcanzar un nivel de seguridad funcional ASIL D24. Lo que nos lleva a la siguiente pregunta, ¿Cómo garantizamos que se alcanza esa tasa de fallo? Tradicionalmente, los constructores han demostrado la tasa de fallo de los vehículos realizando rodajes en carretera durante las fases finales de desarrollo. El demostrar tasas de fallo de ese orden implica el realizar billones de kilómetros.
Es muy útil el análisis realizado por (Kalra & Paddock, 2016), tratando de responder a la pregunta de ¿cuántas millas se necesitarían para demostrar la fiabilidad de un vehículo?, en el mismo, se presenta un estudio estadístico donde se analizan los kilómetros a recorrer para garantizar niveles de seguridad que garanticen un decrecimiento de los accidentes con vehículo autónomo, respecto a los accidentes actuales debidos al factor humano. La siguiente Ilustración resume las principales conclusiones de la publicación:
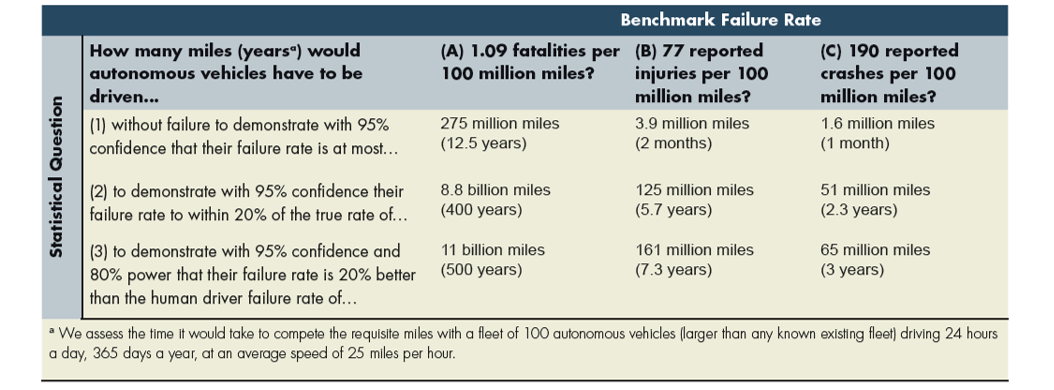 Ilustración 6.
Millas y años necesarios para demostrar la fiabilidad de un vehículo autónomo.
Ilustración 6.
Millas y años necesarios para demostrar la fiabilidad de un vehículo autónomo.
Fuente: Kalra, N., & Paddock, S. M. (2016). Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transportation Research Part A: Policy and Practice, 94, p. 10.
En la tabla, se puede ver que sería necesario conducir, incluso durante años, para ser capaces de garantizar su fiabilidad. De cara a la fabricación de estos vehículos, esto no es viable ni en tiempo ni económicamente, lo que lleva al siguiente paso que es la búsqueda de métodos alternativos de test y nuevos planteamientos.
El procedimiento de test que se está planteando a día de hoy para tratar de cubrir la verificación y validación técnica de los sistemas, se basa en realizar fases de test usando herramientas de simulación y herramientas virtuales primero, y después en laboratorio de forma mucho más intensiva de como se hacía hasta este momento, es decir, en las fases de desarrollo iniciales previamente a su salida a carretera (ver Ilustración 7).
Esto favorece que, previamente a su salida a carretera y comenzar a circular, se trabaja en laboratorio sobre escenarios virtuales que pueden ser creados de forma más sencilla, y que se pueden recrear grandes volúmenes con un coste acotado. Una vez creadas las bases de datos de escenarios pueden repetirse los test de forma automática todas las veces que se necesiten sobre los sistemas. De esta forma, lo que se busca es intensificar estas fases de test para detectar y reducir el número de fallos del sistema en fases iniciales de desarrollo, de forma que cuando se comience los test en vehículo en pistas de pruebas y en carreteras externas poder limitar el número de kilómetros y tiempo que haya que dedicar.
Económicamente también tiene un impacto importante puesto que las fases de simulación y test en laboratorio tienen un coste más acotado y el tiempo de ejecución es más reducido.
 Ilustración 7.
Curso de test durante proceso de desarrollo conducción autónoma.
Ilustración 7.
Curso de test durante proceso de desarrollo conducción autónoma.
Fuente: CTAG, Curso sobre Conducción Automatizada y Autónoma Organizado por ITS España, Octubre de 2017. Elaboración propia.
En un primer paso se trabaja en entornos completamente simulados, donde se simula el vehículo completo (salvo el algoritmo/función/subsistema a probar, que se prueba el real), el entorno e incluso el conductor y sus reacciones. En un siguiente paso, se preparan bancos de test SiL25 y HiL26 en los que cada vez se va aproximando el entorno mucho más a la realidad del vehículo final. Una vez se hacen test intensivos en estas dos fases iniciales, se prosigue con la ejecución de test en pistas donde se recrean escenarios controlados y a continuación se procede a los test en carretera abierta, donde el objetivo es ver el comportamiento del sistema en condiciones reales y se puede analizar estadísticamente el comportamiento del vehículo en cuanto a tasa de fallos.
Hasta el momento, se ha visto el planteamiento para los test en fase de desarrollo que podríamos decir que son los test que hace cada fabricante de forma interna para garantizar la calidad final de su producto, pero, previamente a comercializar el vehículo, además de estos test, se deberán ejecutar los procedimientos de test que garanticen el cumplimiento de los estándares nacionales e internacionales, los estándares establecidos por los consumidores y los procedimientos de test que marquen los requisitos legales para poder salir a carretera (test de homologación) que normalmente dependen del área geográfica en la que nos encontremos. En la siguiente ilustración se puede ver esquematizado el proceso completo.
De cara a este proceso, se plantean diferentes retos una vez se trata de aplicar a los vehículos autónomos. Por una parte, el ya comentado que de cara a garantizar la fiabilidad técnica, será necesario buscar métodos alternativos de test que permitan abordar el volumen de escenarios de test que se plantea. Por otra parte, los estándares y regulaciones actuales tienen un alcance limitado, se basan en la ejecución de escenarios simples que se aplican igual a todas las implementaciones. La prueba de que el sistema se comporta de forma robusta en una variedad amplia de escenarios y de condiciones de contorno recae sobre el fabricante y los proveedores.
Por ejemplo el Type Approval Europeo para vehículos de pasajeros (basado en 2007/46/EC y ECE-Regulations 13 & 79) no está focalizado en los sistemas de ayuda a la conducción (ADAS), pero, por el momento es aplicable tanto en cuanto los sistemas son controlados por el conductor en todas las situaciones (niveles de automatización bajos).
En el momento que los sistemas de conducción sean cada vez más automatizados, y se alcancen niveles L4 y L5 se alcanzará un punto donde la regulación no será suficiente, y se hará necesario evolucionarla para poder autorizar la salida de estos vehículos a carretera.
En resumen, a día de hoy se están estableciendo grupos de trabajo de legislación y certificación los cuales están comenzando activamente a trabajar en la evolución futura tanto de la legislación como los procedimientos de certificación y homologación. Este trabajo es todo un reto imprescindible para poder llegar a la comercialización de este tipo de vehículos en un corto plazo de tiempo, aunque todavía no esté claro el enfoque final que se aplicará.
V. CONCLUSIONES
Primera. Subsistema persona, vehículo, infraestructura y norma, estructuran al sistema vial, un sistema que reiteradamente se desequilibra en forma de siniestro vial, el cual no se produce de forma instantánea, sino que se desarrolla en el tiempo y en el espacio a raíz de una serie de motivos ligados al subsistema humano. Esto es porcentualmente, distracciones, velocidad excesiva, y consumo de alcohol y drogas en la conducción, conductas todas ellas que transgreden las normas de seguridad vial, que aun cuando se conocen, ni son comprendidas ni aceptadas. Ambas condiciones, premisas para garantizar la armonía del sistema, unidas a la baja percepción de riesgo subjetivo asociado a su incumplimiento, generan la inestabilidad del mismo como se ha relatado. Subsiguientemente, dada la clara sobreexposición al subsistema humano del sistema vial, ha provocado que el número de siniestros viales con resultado de personas fallecidas, no sólo haya dejado de descender sino que ha aumentado ligeramente, pese a que se han destinado recursos y adoptado medidas para que esta situación dejase de producirse con tanta asiduidad.
En vista de que la realidad descrita no tiene visos que en el corto plazo se revierta, el subsistema vehículo se ofrece como alternativa al humano para dotar al sistema de mayor equilibrio, y con ello evitar que los siniestros viales sigan provocando la pérdida de vidas humanas. Y ciertamente, desde que el automóvil se ha puesto al servicio de las personas, y la industria automovilística no ha dejado de crecer desde mitad del siglo pasado, varias han sido las etapas evolutivas del mismo, la de estas últimas décadas, incorporar más y mejores sistemas de seguridad activa y pasiva. Elementos de seguridad ambos, que sin lugar a dudas han servido precisamente para evitar o mitigar los efectos tras la producción de un siniestro vial. Empero, los potenciales beneficios de incorporar sistemas de seguridad inteligentes ADAS en los vehículos fabricados de serie como parte de la estrategia de la Comisión en términos de prevención de siniestros viales, traerá consigo considerables frutos en términos de mayor seguridad vial, y aunque la seguridad mejorará de acuerdo a los estudios realizados, será de manera incremental, pues, la renovación del parque de vehículos no se antoja inmediata al superar en todas las categorías los 10 años de media de antigüedad.
Segunda. Una automatización alta o total del vehículo contribuirá a mejorar la seguridad del tráfico al reducir la carga de trabajo del conductor, en términos de conducción, y minimizar los incidentes humanos debidos a la distracción del conductor o la vigilancia reducida. Otro impacto importante será la reducción de la congestión, principalmente en las zonas urbanas y en las autopistas, al optimizar los estilos de conducción, minimizar las variaciones de velocidad y evitar los casos de paradas. Esto bajará significativamente las emisiones de los vehículos y el consumo de combustible por kilómetro recorrido y, por lo tanto, tendrá un impacto positivo en el medio ambiente.
Conducir de forma altamente o totalmente automatizada en autopistas públicas podría ser aceptable dentro de los próximos diez a quince años, una vez que se hayan resuelto los problemas legales controvertidos. La complejidad de la conducción automatizada en áreas urbanas es particularmente desafiante y requiere un desarrollo tecnológico adicional para que los vehículos sean extremadamente seguros. Sin embargo, existen una serie de desafíos los que nos enfrentamos que condicionarán la incorporación de estos vehículos en la red viaria. Los propiamente tecnológicos y la aceptación del usuario es uno de los pilares que condiciona la implementación de estos sistemas en el vehículo.
El usuario debe considerar que sea útil y estar en un coste adecuado. El coste depende del volumen de producción. Va a ser barato si se venden muchos coches con dicho sistema y por consiguiente sí el usuario está dispuesto a pagar por ello. Pero además de sistemas de seguridad opcionales para el usuario, existirán sistemas obligatorios por legislación, lo que determinará si se implementa o no en el vehículo. Atendiendo a la distribución de coste de acuerdo al tipo de sistema de conducción autónoma. Se cree que hasta el 15% de los nuevos vehículos podrían ser de nivel 4 en el 2030. Sin embargo, hay que tener en cuenta que el incremento del mercado de vehículo autónomos en los próximos años puede variar dependiendo de si es un escenario de baja o alta disrupción.
Tercera. En cuanto al reto de garantizar la fiabilidad del vehículo y su seguridad en carretera, no está todavía claro, qué nivel de seguridad se necesitará requerir al vehículo para garantizase un rendimiento y ejecución de la tarea de conducción que mejore en determinado porcentaje a la del ser humano. Y además, que minimice los errores provenientes del propio vehículo aunque lo que sí resulta indudable es que se requerirán niveles de confiablidad lo suficientemente elevados que suponen limitaciones en los métodos de test actuales.
El sector está trabajando actualmente en definir nuevos métodos y procedimientos para superar estas barreras y de forma realista en tiempo y coste ser capaces de tener vehículos lo suficientemente fiables en carreta. Asimismo, los organismos de legislación y certificación están trabajando sobre los escenarios futuros para poder adaptar la normativa actual.
Cuarta. Llegados a este punto, parece cierto ya que el vehículo autónomo y conectado ha pasado a formar parte de la movilidad, de hecho, además de las tradicionales marcas de vehículos, otras muchas se están sumando en el desarrollo de niveles de automatización 5. También, consultoras como PwC y KPMG, en sendos informes (PwC, 2018) apuesta porque el coche del futuro será eléctrico, autónomo, compartido, conectado y actualizado anualmente “eascy”, estiman que el vehículo autónomo será la circunstancia que más tarde en hacerse realidad, el nivel 4 estaría previsto para 2022/2023 y el 5 progresivamente al considerar que entre el 85% y el 90% del año 2030 los coches todavía sean conducidos por personas.
En lo que respecta a los informes sobre el Índice28 de adaptación a vehículos autónomos de la consultora (KPMG, 18) y (KPMG, 2019) relata que todos los países objeto de estudio, un total de 25, avanzan para un escenario donde el vehículo autónomo será un hecho. España, que ocupa el puesto 15 de los 25 países evaluados, en el informe del año 2018, refiere que la infraestructura, la calidad relativamente alta de las carreteras y redes móviles de España se ve socavada por una muy baja densidad de estaciones de carga eléctrica y niveles medios de cobertura 4G. También, que no tiene ninguna prueba sobre vehículos autónomos en curso y es menos probable que los españoles acepten la tecnología incorporada a los mismos de acuerdo con los datos de encuestas de los consumidores, lo que lleva a su baja clasificación en cuanto a la aceptación de los consumidores.
En el informe de 2019, a pesar de que España descendió 3 puestos, obtuvo una puntuación mayor que la de 2018, pasó de 14.58 a 15.50 dada la mejora en tecnología e innovación. Se habla de la Plataforma de Vehículo Conectado 3.029 (Plataforma de Vehículos Conectados 3.0), encaminada a establecer un sistema en tiempo real a través del cual los vehículos pueden conectarse e intercambiar información de tráfico, reseña que las ciudades españolas están emprendiendo sus propios proyectos, y que se está avanzando en una plataforma digital para conectar vehículos e infraestructura.
En este sentido, España evoluciona en proyectos de sistemas inteligentes de transporte cooperativos (C-ITS), espacio donde se enmarca el piloto DGT 3.0 de la Dirección General de Tráfico, la cual será la encargada de desarrollar y coordinarlo. “Un punto clave, será la nube donde se reciban y emitan informaciones sobre tráfico y meteorología desde cualquier dispositivo y vehículo conectado a la plataforma DGT 3.0 que recibirá la información aportada por los usuarios y otros proveedores de datos conectados con objeto de procesarla, refinarla y contrastarla de forma anónima, para su envío personalizado al dispositivo embarcado o al móvil del usuario”, (Ventosa, J.R, 2018, pág. 11), este mismo autor (Ventosa, J.R, 2017, pág. 84), en el artículo que desarrolla como serán las infraestructuras adelanta que “en pocos años circularán vehículos eléctricos y autónomos, con una apariencia similar a las actuales, tendrán prestaciones adaptadas a la era digital: de meras infraestructuras inanimadas pasarán a ser plataformas inteligentes de servicios, cuyo objetivo será la de mejorar la seguridad y fluidez de un tráfico que crece sin freno, especialmente en las grandes áreas metropolitanas”.
No obstante, la celeridad de los cambios que se aproximan para la implantación del vehículo autónomo y conectado, no sólo dependerán del grado de evolución tecnológica y validación de sistemas que incorpore, así como de la conectividad e infraestructura, primordialmente necesitamos de una regulación normativa específica30 para este tipo de vehículos. La circunstancia de atribuir la responsabilidad de la conducción a la tecnología de un vehículo, requiere la de afrontar una regulación normativa que contemple, entre otras, aspectos relacionados la determinación de responsabilidad penal de las personas jurídicas, extenderla a los delitos imprudentes, fijarla, dada la falta de dominio del hecho del conductor, ya que el delito se comete en calidad de conductor, la persona que maneja el mecanismo de dirección o va al mando de un vehículo, esta circunstancia califica a estos delitos como de propia mano, y exige la realización directa y personal de la acción típica. Por tanto, la distribución de responsabilidades, las de carácter penal como se ha citado, las civiles y administrativas serán cuestiones que deben quedar lo suficientemente claras para que la conducción autónoma despliegue toda su potencialidad.
Para concluir, se hace referencia a los aspectos clave del informe (KPMG, 18) y (KPMG, 2019) sobre los motivos que sitúan a Holanda en el primer puesto de los países que se encuentra en mejor disposición para implementar el vehículo autónomo y conectado. Esto es, puesto número uno en infraestructura, su red de carreteras y buen mantenimiento la considera como una de las mejores del mundo por el Foro Económico Mundial y el Banco Mundial. También tiene, con mucho, la mayor densidad de puntos de recarga de vehículos eléctricos, con 26.789 puntos disponibles al público en 2016, según el Global EV Outlook de la Agencia Internacional de Energía
Sigue el informe, acreditando que además de que Holanda dispone de una gran infraestructura ocupa el segundo lugar después de Singapur en el pilar de aceptación del consumidor, y se clasifica a la cabeza de preparación tecnológica del Foro Económico Mundial, además que tres cuartas partes de la población vive en áreas que están probando la tecnología incorporada a la los vehículos autónomos.
Finalizando en política y legislación, su Consejo de Ministros aprobó las pruebas en 2015, y tomó la iniciativa de establecer la Declaración de Amsterdam31 a través de la cual los países de la UE acordaron acelerar el desarrollo de los vehículos de auto conducción. Inclusive, avanzan en el desarrollo de un marco legal que contemple, entre otras cuestiones, permisos de conducción enfocados a las exigencias de esta nueva forma de movilidad, en Gráfico 8 se reproducen los datos ofrecidos por la consultora KPMG diferenciado por países y pilares.
Sin duda alguna, el escenario que nos podemos imaginar tras la lectura de este trabajo suscita muchos interrogantes, cardinalmente sobre los cuatro pilares que son objeto de estudio por la consultora KPMG, ¿qué normas son apropiadas para este tipo de vehículos?, ¿se necesita un mayor desarrollo para las infraestructuras cooperativas?, ¿hasta qué punto cumplen con los requisitos de seguridad y protección para que sean aceptados?, ¿qué nivel de tecnología resulta adecuado?, entre otras.
A pesar de estas y otras cuestiones que figuran en el informe del año 2019 del Consejo Asesor de Investigación del Transporte por Carretera (ERTRAC)32, en concreto, sobre la seguridad de vehículos altamente automatizados, creen que el impacto esperado dependerá de su aceptación. Pero sobre todo, de la reducción del sufrimiento que provoca la muerte o heridas graves con secuelas permanentes a una persona tras un siniestro vial, y también la menor carga en el sistema de salud, dado el plus de seguridad que nos ofrece este tipo de vehículos tal y como se ha explicitado a lo largo de este documento. ((ERTRAC), 2019, pág. 19)
VI. BIBLIOGRAFÍA
(ERTRAC), E. R. (2019). Safe Road Transport Roadmap. Towards Vision Zero.
Agencia Estatal de Evaluación de las Políticas Públicas y la Calidad de los Servicios (AEVAL). (2009). Evaluación del Plan Estratégico de Seguridad Vial 2005-2008 (PESV)
Arnold Cathalifaud, M., & Osorio González, F. (1998). Introducción a los conceptos básicos de la teoría general de sistemas.
Bernhart, W., & Winterhoff, M. (2016). Autonomous Driving: Disruptive Innovation that Promises to Change the Automotive Industry as We Know It. In Energy Consumption and Autonomous Driving (pp. 3-10).
Dirección General de Tráfico. (2005). Las principales cifras de la siniestralidad vial. España 2005
Dirección General de Tráfico. (2005). Plan Estratégico Seguridad Vial 2005-2008
Dirección General de Tráfico. (2011). Estrategia de Seguridad Vial 2011 –2020
Dirección General de Tráfico. (2015). Autorización de pruebas o ensayos de investigación realizados con vehículos de conducción automatizada en vías abiertas al tráfico en general. Instrucción 15/V-113.
Dirección General de Tráfico. (2016). Informe y Análisis Sobre la Influencia de los Sistemas de Ayuda a la Conducción en la Seguridad Vial.
Dirección General de Tráfico. (2017). Las principales cifras de la siniestralidad vial. España 2017
Domínguez, J. A. (s.f.). El Modelo Secuencial de Eventos de un Siniestro (MOSES).
Europea, C. (2018). Cost-effectiveness analysis of Policy Options for the mandatory implementation of different sets of vehicle safety measures – Review of the General Safety and Pedestrian Safety Regulations.
European Road Transport Research Advisory Council. (ERTRAC) (19). Safe Road Transport Roadmap Towards Vision Zero: Roads without Victims Status.
Fiscalía General Estado. (2017). Memoria de la actividad desarrollada por el Ministerio Fiscal a lo largo del año 2016.
Gao, P., Kaas, H. W., Mohr, D., & Wee, D. (2016). Automotive revolution–perspective towards 030: How the convergence of disruptive technology-driven trends could transform the auto industry. Advanced Industries, McKinsey & Company.
Kalra, N., & Paddock, S. M. (2016). Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability?. Transportation Research Part A: Policy and Practice, 94, 182-193.
KPMG. (18). Autonomous Vehicle Readiness Index.
KPMG. (2019). Autonomous Vehicle Readiness Index.
Pwc. (2015) Connected Car Study.
PwC. (2018). Five trends transforming the Automotive Industry.
Rosende, J. (2008). Electronica y seguridad activa. Anales de mecánica y electricida (Vol.85,No. 1 pp.54-62). Asociacion de Ingenieros del ICAI.
Ruiz, J. L. (2001). La evolución de la industria automovilística española, 1946-1999: una perspectiva comparada. Revista de Historia Industrial, (19).
Tabasso, C. (2012). Paradigmas, teorías y modelos de la seguridad y la inseguridad vial.
Test and validation challenges facing adas and cav chris reeves horiba mira. (2017)
Ventosa, J.R. (2017). Carreteras 4.0. Cómo serán las infraesturas viarias del futuro. Ministerio de Fomento, 84-89.
Ventosa, J.R. (2018). Carreteras conectadas e inteligentes. Revista del Ministerio de Fomento, 10-13.
Viereckl, R., Ahlemann, D., Koster, A., & Jursch, S. (2015). Connected Car Study 2015: Racing ahead with autonomous cars and digital innovation.
NOTAS
1
El subsistema humano engloba a los usuarios que hacen uso de las vías objeto de la legislación del tráfico, el tecnológico lo constituye el vehículo, la infraestructura viene determinada por las vías y terrenos públicos aptos para la circulación, en los que resulte de aplicación el referido texto articulado de la Ley sobre Tráfico, Circulación de Vehículos a Motor y Seguridad Vial, y el socio normativo abarca los comportamientos regulados en las normas relacionadas con la seguridad vial.
2
El factor socio normativo nos aporta información sobre el comportamiento de los usuarios de las vías, de los denominados vulnerables así como del resto, en relación con el cumplimiento de las normas jurídicas relacionadas con la seguridad vial y las sociales, es decir del resto de usuarios que interactúan entre sí.
3
Percepción: este proceso permite a los seres humanos recibir los estímulos a través de los órganos de los sentidos, los nervios y el cerebro.
4
Intelección: implica la identificación y la compresión de los estímulos.
5
Evaluación: este paso incluye la evaluación de la respuesta apropiada que cualquiera tiene que hacer frente a los estímulos. Esto implica la elección de una maniobra, −frenado, movimiento lateral−, para evitar la colisión.
6
Volición: es la ejecución de la decisión y tiene como resultado una acción física del conductor o del usuario de la vía.
7
La propuesta de Reglamento del Parlamento Europeo y del Consejo, que se cita con posterioridad en lo referente a la incorporación de sistemas de seguridad inteligentes (ADAS), exigirá la introducción de registradores de datos de eventos (cajas negras) en los vehículos, con ello, se pretende que almacenen una serie de datos cruciales a lo largo de un breve plazo antes, en el transcurso y después de la producción de un siniestro vial. Se deduce pues, que la obtención de datos más precisos y exhaustivos sobre el desarrollo secuencial del siniestro vial, serán de utilidad para un posterior análisis del que se podrán extraer conclusiones acerca del grado de eficacia de las medidas que se hayan adoptado, así como la etiología del propio siniestro vial.
8
Campón Rodríguez define fase, en el marco definido por MOSES como el conjunto de posiciones de los vehículos y personas implicadas distribuidas a lo largo del tiempo en que se van desarrollando los eventos y que desembocan en la producción del siniestro y en su posterior devenir hasta que alcanzan su posición final.
9
Afirmación hecha pública en el informe de evaluación del Plan Estratégico de Seguridad Vial 2005-2008 realizado por la Agencia Estatal de Evaluación de las Políticas Públicas y la Calidad de los Servicios (AEVAL) que ha dejado de estar plenamente operativa como consecuencia de la disolución de la misma por el Real Decreto 769/2017, de 28 de julio (publicado en el BOE del 29 de julio), pasando sus funciones a ser asumidas por la Secretaría de Estado de Función Pública, a través del Instituto para la Evaluación de Políticas Públicas y de la Dirección General de Gobernanza Pública.
10
Un plan estratégico es un documento que desarrollan un conjunto de actuaciones y actividades que tienen como objeto mejorar los niveles de seguridad de las operaciones de transporte de una empresa u organización, optimizando el uso de los recursos disponibles. O dicho de otra forma, un instrumento de planificación que contiene las acciones, mecanismos, estrategias y medidas que deberían adoptar las diferentes entidades organizaciones y empresas del sector público y privado. Y dado que la seguridad vial es un aspecto que preocupa a la población en general, desde el ámbito internacional hasta el Estatal, Autonómico y Local diseñan planes cuyas directrices comunes se centran en la reducción del número de fallecidos y heridos graves. En concreto, en la actualidad se encuentra operativa la Estrategia de Seguridad Vial 2011-20201 cuyo objetivo principal es reducir a la mitad las víctimas fallecidas en siniestros viales en el decenio referido, para ello se han establecido 6 prioridades estratégicas para alcanzar el objetivo de reducir el impacto socio-económico de los accidentes de tráfico, a saber: proteger a los usuarios más vulnerables, potenciar una movilidad segura en la zona urbana, mejorar la seguridad de los motoristas, mejorar la seguridad en las carreteras convencionales, mejorar la seguridad en los desplazamientos relacionados con el trabajo y mejorar los comportamientos en relación a alcohol y velocidad en la conducción.
11
La Organización Internacional de Fabricantes de Vehículos Automotores fue fundada en París en 1919. Es conocida como la "Organización Internacional de Constructores de Automóviles" (OICA).
12
Frenado de emergencia en automóviles. Promoción de sistemas como el alcolock en automóviles, furgonetas, camiones y autobuses para evitar la conducción bajo los efectos del alcohol. Sistemas de detención de la somnolencia y de la atención en automóviles, furgonetas, camiones y autobuses. Reconocimiento y prevención de distracciones en automóviles, furgonetas, camiones y autobuses. Sistema capaz de registrar los accidentes en automóviles y furgonetas. Señal de parada de emergencia en automóviles, furgonetas, camiones y autobuses. Protección de ocupantes en colisión frontal y mejora del cinturón de seguridad para automóviles y furgonetas. Ampliación de la zona de impacto de la cabeza para peatones y ciclistas en automóviles y furgonetas. Asistencia de velocidad inteligente en automóviles, furgonetas, camiones y autobuses. Asistente para el mantenimiento del carril en automóviles y furgonetas. Protección de ocupantes de impacto lateral de poste para automóviles y furgonetas. Cámara de marcha atrás o sistema de detección en automóviles, furgonetas, camiones y autobuses. Sistema que controla la presión de los neumáticos en furgonetas, camiones y autobuses. Detección y advertencia de usuario de la carretera vulnerable en parte delantera y lateral del vehículo en camiones y autobuses. Mejora de la visión directa desde la posición del conductor hacia usuarios vulnerables en camiones y autobuses.
13
Propuesta de REGLAMENTO DEL PARLAMENTO EUROPEO Y DEL CONSEJO relativo a los requisitos de homologación de tipo de los vehículos de motor y de sus remolques, así como de los sistemas, componentes y unidades técnicas independientes destinados a esos vehículos, referentes a su seguridad general y a la protección de los ocupantes de los vehículos y de los usuarios vulnerables de la vía pública, por el que se modifica el Reglamento (UE) 2018/… y se derogan los Reglamentos (CE) n.º 78/2009, (CE) n.º 79/2009 y (CE) n.º 661/2009.
14
Como se ha visto, los principales vínculos epidemiológicos relacionados con la seguridad vial son el consumo de alcohol y drogas, la velocidad y las distracciones.
15
PO1: se encuentre ampliamente disponible aún no es obligatorio en la UE. PO2: como PO1 ofrece soluciones de seguridad adicionales que se centran en usuarios vulnerables de la carretera, su protección y en asegurar la atención del conductor cuando conduce. PO3: ya existen en el mercado, pero tienen una baja tasa de adaptación y aceptación al mismo, es la que más víctimas mortales evita.
16
A: 1 de septiembre de 2021 (nuevos tipos aprobados), 1 de septiembre de 2023 (vehículos nuevos).
17
B: 1 de septiembre de 2023 (nuevos tipos aprobados), 1 de septiembre de 2025 (vehículos nuevos).
18
En 1926 Radio Control Co. presenta el vehículo “Linriccan Wonder”. La Compañía fue fundada por el ingeniero Eléctrico Francis Pa. formado en la “U.S. Army”. Sin embargo, extraoficialmente, en 1921 los militares presentaron en Ohio un vehículo de tres ruedas controlado por radio.
19
C2X. Siglas que engloban Comunicación Vehículo-Infraestructura (C2I) y Comunicación Vehículo- Vehículo (C2C).
20
Cloud Computing. Computación en la nube. El procesamiento de los algoritmos se realiza en servidores de la nube y no en el vehículo.
21
Floting car Data FCD. Método para obtener información de tráfico y del vehículo. Se basa en el uso del vehículo como sensor, recogiendo información de velocidad, luces, dirección, tiempos, etc. Esta información es una Fuente fundamental para obtener información de tráfico y para la mayoría de los sistemas inteligentes de Transporte (ITS).
22
AVs (Autonomous Vehicles). Vehículos totalmente autónomos sin intervención del conductor.
23
Casos de Uso: describe las acciones que debe realizar el vehículo autónomo en el proceso de conducción. Todas aquellas situaciones que no son definidas como caso de uso, pueden producir un comportamiento incierto del sistema.
24
La ISO 26262 es una norma de seguridad funcional que es de obligada aplicación en el desarrollo de sistemas de seguridad críticos en el automóvil. En el marco de este estándar se definen diferentes niveles de clasificación de riesgos denominados ASIL (Automotive Safety Integrity Level). Se definen hasta cuatro niveles ASIL, clasificados como A, B, C y D, siendo el D el más crítico. A día de hoy hay un grupo de trabajo viendo como evolucionar esta norma para cubrir las necesidades de los vehículos autónomos porque se cree que no están totalmente cubiertas con las definiciones actuales. En este documento se utiliza la tasa de fallos asociada al ASIL D como nivel más crítico definido hasta este momento con el objetivo de dar una referencia al nivel de criticidad del que se está hablando, aunque, probablemente a futuro pueda haber variaciones.
25
SiL (Software in the Loop) son bancos de tests donde se prueba el SW que va a ir embarcado en el vehículo en un entorno sintético donde todo es simulado/recreado excepto el SW que se está probando.
26
HiL (Hardware in the Loop) son bancos de tests donde se prueba el HW y el SW final que irá embarcado en el vehículo en un entorno sintético donde se recrea el resto de partes con las que interacciona.
27
HORIBA MIRA Ltd. (anteriormente conocida como la Asociación de Investigación de la Industria del Motor) es una empresa de consultoría de ingeniería y desarrollo automotriz con sede en Nuneaton en Warwickshire, Reino Unido. Brinda servicios de ingeniería de productos, investigación, pruebas, información y certificación al sector automotriz. Su sede se encuentra en la Zona Empresarial Parque Tecnológico MIRA.
28
El índice evalúa 4 pilares que son integrales a la capacidad de cada país para adoptar e integrar vehículos autónomos tales como política y legislación; tecnología e innovación; infraestructura; y aceptación del consumidor.
29
Ventosa, J. R. (2017). Carreteras 4.0. Cómo serán las infraestructuras viarias del futuro. Revista del Ministerio de Fomento, (674), 84-89. Los ITS Cooperativos (C-ITS o sistemas cooperativos) abarcan un grupo de tecnologías y aplicaciones que permiten un intercambio de datos eficaz a través de tecnologías de comunicación inalámbrica entre componentes y actores del sistema de transporte, entre vehículos (vehículo a vehículo o V2V) o entre vehículos e infraestructura (vehículo a infraestructura o V2I), se denomina programa C-roads que se puede visitar en la página web https://www.c-roads.es/ .
30
En la memoria de la Fiscalía General del Estado presentada en el año 2017 se mencionaba lo que sigue: (…) el sector del automóvil es el que precisa más urgentemente de normas de la Unión y mundiales que garanticen el desarrollo transfronterizo de los vehículos autónomos y automatizados, considerando que repercutirá, entre otros aspectos, en materia de responsabilidad civil (responsabilidad y seguros), seguridad vial y protección de datos personales y la intimidad. (Fiscalía General Estado, 2017, pág. 561).
31
Bruselas, 30.11.2016 COM (2016) 766 final COMUNICACIÓN DE LA COMISIÓN AL PARLAMENTO EUROPEO, AL CONSEJO, AL COMITÉ ECONÓMICO Y SOCIAL EUROPEO Y AL COMITÉ DE LAS REGIONES Estrategia europea sobre los sistemas de transporte inteligentes cooperativos, un hito hacia la movilidad cooperativa, conectada y automatizada.
32
European Road Transport Research Advisory Council.
Notas de autor
asertrigo@gmail.com












